【歩行制御】立脚期を調整する体性感覚情報の役割
末梢から入力される体性感覚情報は、立脚期の安定性と動きの調整に貢献します。
歩行における予測的な動きの制御、ときに予期せぬ動きに素早く反応することが求められます。
「足が引っかかる」
「支えが弱い」
臨床場面では、「歩きにくさ」の訴えはさまざまです。
患者さんの訴えから、リアルタイムに変化する体性感覚情報を推論し、最適なアプローチへつなげることが大切と考えます。
【歩行制御】体性感覚のフィードバック
セラピーに求められるのは、パフォーマンスにつながる体性感覚情報です。
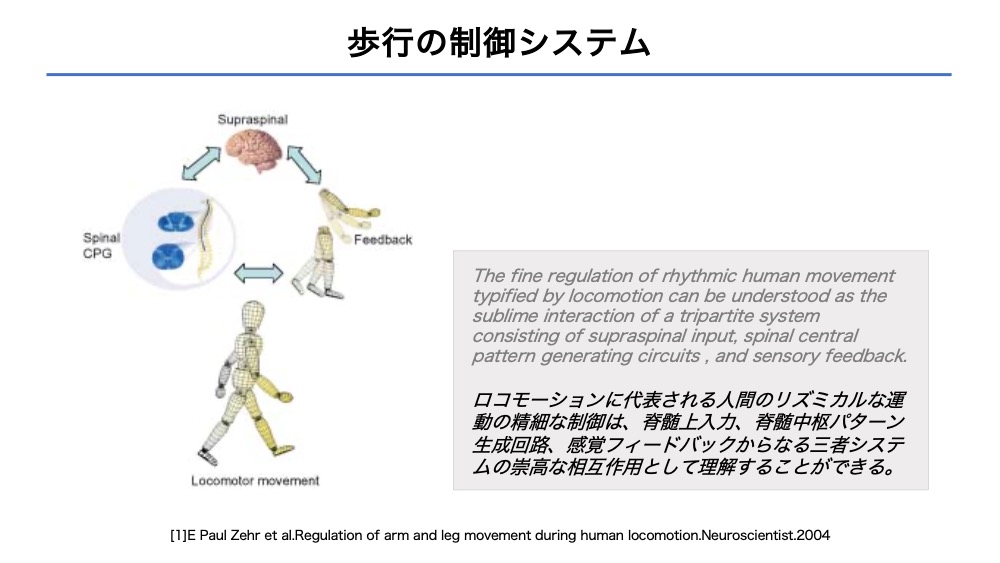
・CPG(脊髄)
・フィードバック(運動/感覚)
歩行制御は、3つのサブシステムの相互作用により調整され、最適化されています。
ではセラピーで課題となるのはどのような場面でしょうか。
・股関節の伸展
・足関節の背屈
特に立脚後期はセラピーにおいて課題となることが多いかと思います。
ここに関わる体制感覚情報の理解は、アプローチにつながる推論の支えとなります。
遊脚期移行のトリガーとなる股関節伸展
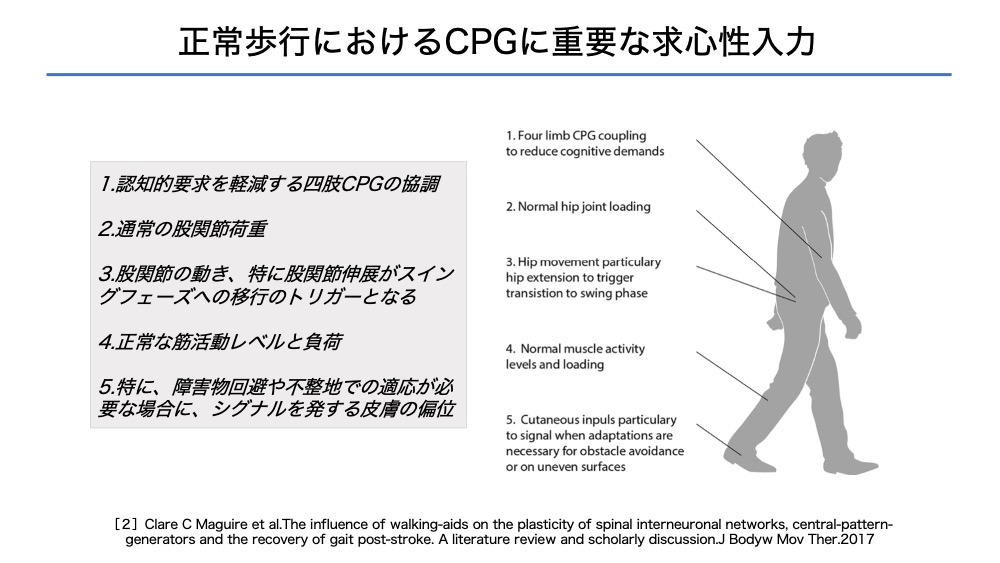
立脚期の股関節伸展が大切な理由は、遊脚期移行のトリガーとなるためです。
この感覚情報の解釈はポイントかと思います。
足先の躓きや引っかかりなど、遊脚期移行の問題は臨床上場面でも遭遇します。
・視覚で確認する(頸部体幹の屈曲姿勢)
・引っかからないよう身体を大きく傾ける(体幹の側屈)
上記のような解決は、皮質による制御の影響が大きいかもしれません。
また、リズミカルな四肢運動(脊髄制御)は得られにくいように思います。
遊脚期移行の問題解決には、「立脚期の股関節伸展」のアプローチを優先することが重要と考えます。
簡単に言うと、「しっかり伸びて支えることができる!」ここの課題解決を優先すべきと思います。
短期的な課題解決よりも、長期的な適応を考えることが大切と考えます。
姿勢制御と足部の発達

次は、足部の感覚について発達の視点で捉えます。
乳児の足部は「プニュプニュ」と柔らかいです。
この時期に身体を抱えて、足を床面につけると歩くような運動パターンが出現します。
ですが、立位姿勢を制御することはできません。
もちろん、一人で歩くことも難しいです。
幼児になると、足部筋は粘弾性を伴い、アーチの形成されていきます。
この時期の歩きは、急に止まれない、つまずいてしまう、ぶつかってしまうなど転ぶことも多いかと思います。
足部は感覚を受け入れる器官として重要です。
片麻痺患者さんの足部とパフォーマンスを考える上で、発達の視点は参考になるかと思います。
立脚期/遊脚期のゴルジ腱器官の働き
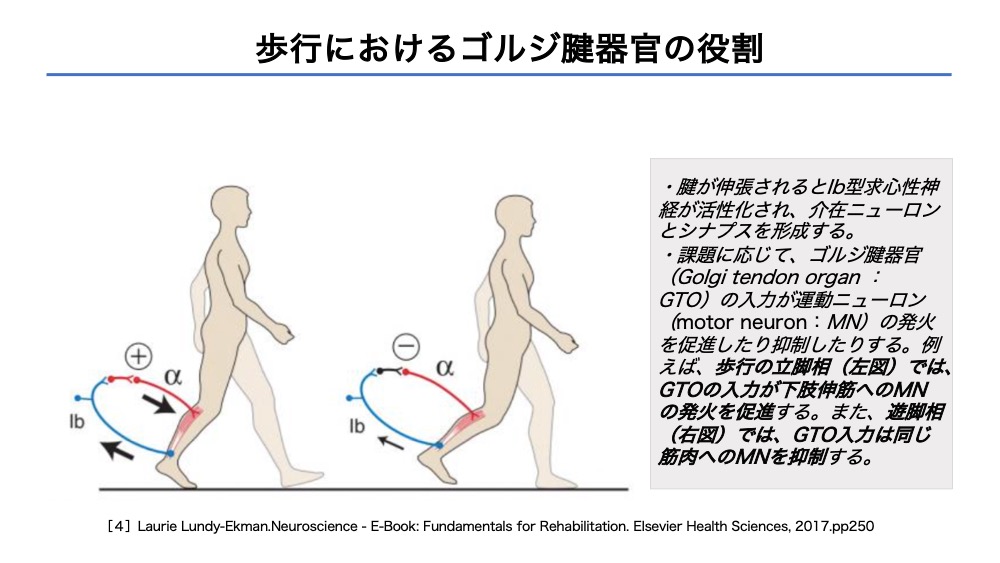
歩行におけるゴルジ腱器官(GTO)の役割について示されています。
立脚期:下肢伸筋の促通
遊脚期:下肢伸筋の抑制
・GASの不均衡(内側頭の過活動、外側頭の低緊張など)
・アキレス腱のマルアライメント
足底の皮膚機械受容器

足底の皮膚機械受容器の分布が示されています。
・適応の速度
これらは、感覚の変位や識別を考える上で大切と言えます。
メルケル盤やマイスナー小体は、小趾側に高密度に分布しています。
これらは、足底外側の荷重のセンサーとして働き、側方へのバランス制御に貢献している可能性が考えられます。
立脚期において、側方のsway(揺れ)が大きく、足底外側の荷重を知覚しにくいケースを経験します。
セラピーを通して不足している感覚情報を提供し、パフォーマンスへの影響を推論することが大切と考えます。
まとめ
本日は、【歩行制御】立脚期を調整する体性感覚情報の役割というテーマで書きました。
立脚期の安定性と動きの調整に、体性感覚情報の理解は不可欠です。
パフォーマンスにつながる体性感覚情報を考えることが大切と考えます。
以上になります。
最後まで読んでいただきありがとうございました。
少しでも明日の臨床につながれば幸いです。
References
1.E Paul Zehr et al.Regulation of arm and leg movement during human locomotion.Neuroscientist.2004
3.Yury Ivanenko,Victor S Gurfinkel.Human Postural Control.Front Neurosci.2018