
CPGと体性感覚フィードバック【歩行】
リズミカルな歩行運動には、CPG(central pattern generator)と体性感覚フィードバックが重要な役割を果たします。
CPGは、「中枢性パターン発生器」と呼ばれ、呼吸・咀嚼・運動(歩行・泳ぎ・サイクリング)に関与しています。
これらに共通する点は、意識せず自動化されていることにあります。
歩行を考えると、環境に応じてパターンを変化させています。
「一歩一歩考えながら歩いている」
「つまずいても気づかない」
仮に、このような状況では移動に多大な労力を必要とします。
片麻痺患者さんにおいても、環境にあわせて変化できるリズミカルな歩行パターンを目指すべきです。
はじめに、リズミカルな歩行を支える運動制御モデルから確認していきます。
リズミカルな歩行の運動制御モデル
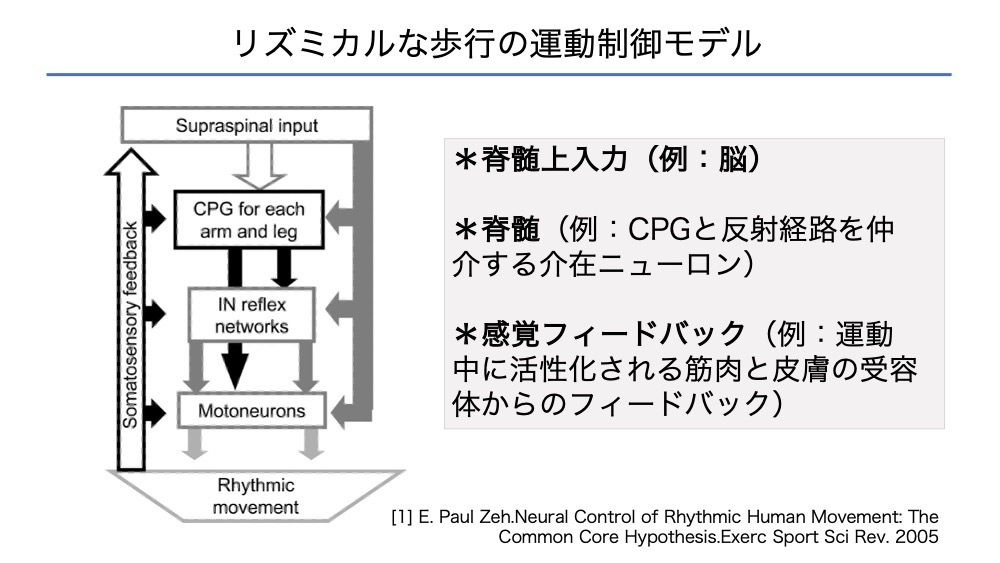
CPG=脊髄内の活動ですが、体性感覚フィードバック・脊髄上入力(脳)のコネクションが大切といえます。
例えば、屋外を散歩していて信号機が赤になれば止まりますよね。
信号を発見(注意・認知)し、「赤」なので止まる(判断)
このときの歩行パターンは、信号に近づき少しずつ減速しながら止まりますよね。
これらは皮質(脊髄上入力)の関与がなければできないことですよね。
また、皮質と脊髄の結合が弱い時期、乳幼児に前方、後方、側方など、さまざまな歩行パターンを作り出すことできること[1]から歩行パターンの変化に、脊髄と体性感覚フィードバックの結合が重要であることが示されています。
実際、路面の変化(アスファルト・砂利・芝・雪・雨)によるフィードバックにあわせて歩行パターンは変化します。
足のつまずきや引きずりにも対応できますよね。
歩行パターンの変化に体性感覚フィードバックは重要な役割を担っているといえます。
【下肢】屈筋と伸筋の相互作用
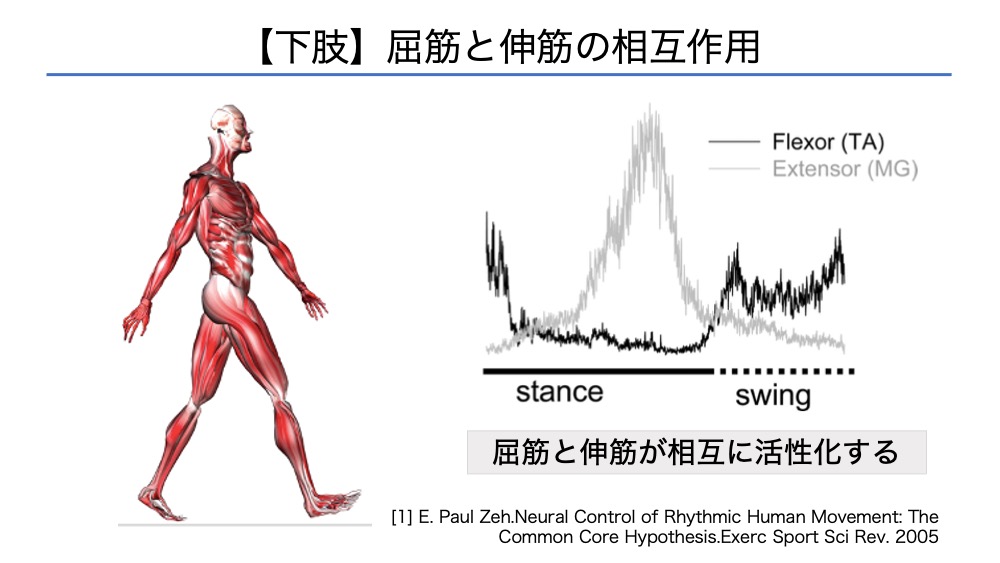
では、リズミカルな歩行を支える下肢筋活動を確認していきます。
屈筋と伸筋が相互に活性化するのがポイントです。
・不安定で支えられない
・足のひっかかりを気にしている
片麻痺患者さんであれば一度は経験があるかと思います。
臨床においてのポイントは、支持を強くすることを優先すべきです。
例えば、足のひっかかからないよう振り出しを練習することがあるかと思います。
つまり、遊脚期のセラピーです。
しかし、このようなケースも立脚期(特に後期)に強い支持ができているかを確認しましょう。
次に、相互の切り替えが十分にできているかを確認していきます。
伸筋の動員(図)を見る限り、第一に強い立脚期を作ることを優先すべきと考えます。
立脚後期(蹴り出しのフェーズ)は、多く片麻痺患者さんにおいて課題となることが多いです。
基本的ですが 、関連する筋群を確認しておきます。
立脚後期を考える
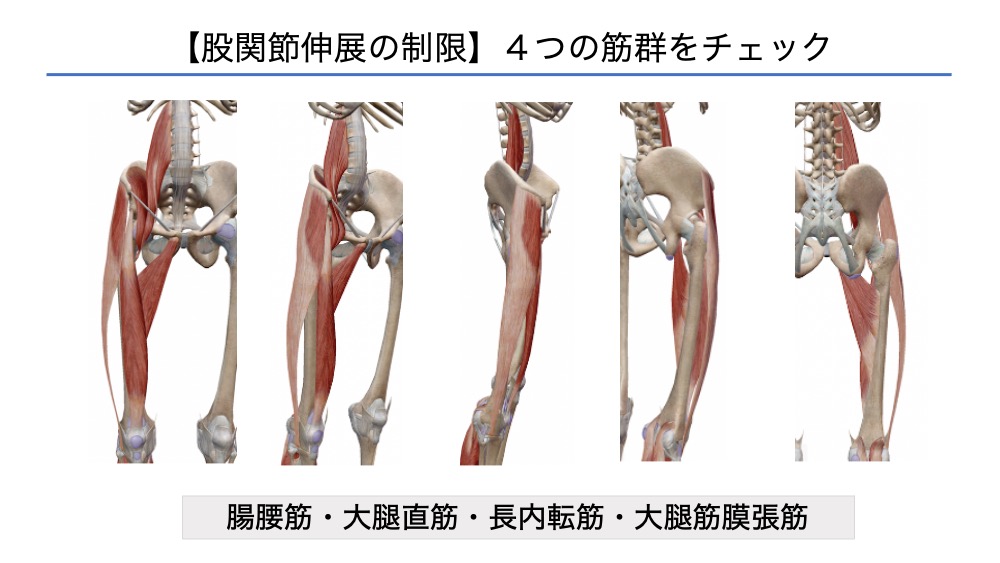
股関節の4つの筋群をチェックしましょう。

足関節の3つの筋群をチェックしましょう。

足趾の2つの筋群も忘れずにチェックしましょう。
・筋緊張
・粘弾性
・筋肉の長さ
筋肉は、体性感覚フィードバックによる運動制御に大きな役割を果たします。
立脚後期を制限するものはないか、基本的ですが拮抗筋をチェックしておくことは大切です。
リズミカルな歩行には腕振りも重要
歩行と上肢に関する記事は過去に書きました。
気になる方は読んでみてください。
まとめ
本日は、リズミカルな歩行のCPGと体性感覚フィードバックの重要性について考えました。
片麻痺歩行で目指すべきは、会話しながら周囲を見回しても転ばずに歩けるレベルです。
歩行の運動パターンを観察し、課題を整理できると良いかと思います。
以上になります。
最後まで読んでいただきありがとうございました。
少しでも明日の臨床につながれば幸いです。
References