下肢の運動に先立つ姿勢の安定
「立位姿勢から一歩踏み出す」
この動きが片麻痺患者さんではとてつもなく難しい課題であることを多く経験します。
歩行開始において
・支持脚への重心移動が難しい
・大きく姿勢を傾ける
このような現象は一度は経験があるかと思います。
下肢の運動に先立ち姿勢の安定について基礎知識を理解し、臨床実践につなげることは大切であると考えます。
はじめに股関節の運動と体幹筋について確認していきます。
股関節の運動に先行する腹横筋
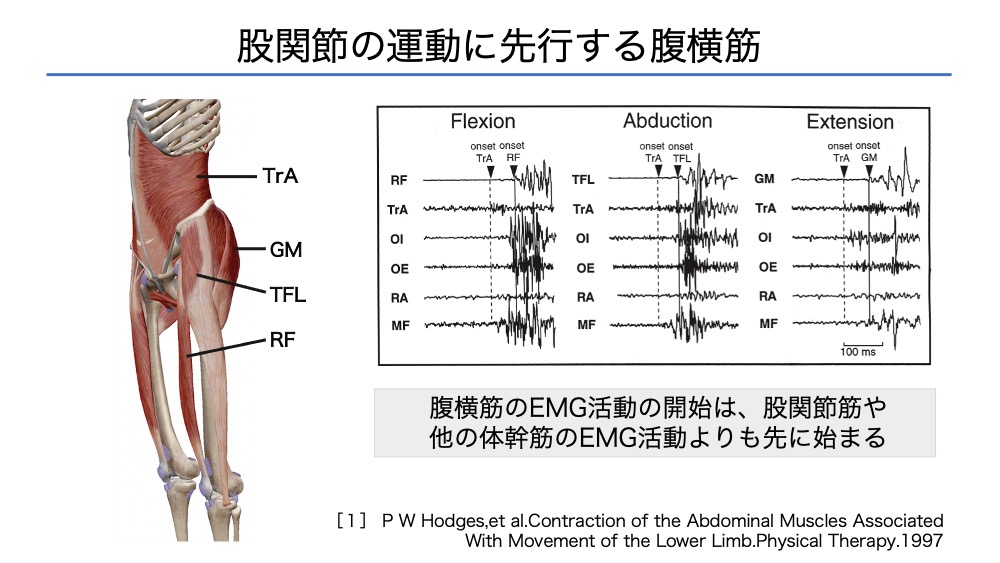
Hodgesらは、健常者における立位姿勢の股関節屈曲・外転・伸展に先立ち腹横筋のEMG活動がみられる[1]ことを明らかにしています。
下肢を動かすことによる脊柱の不安定性を補う役割を腹横筋が担っているわけです。
腹横筋の働きが不十分な場合、どのようなことが考えられるでしょうか。
まずは、歩行開始に大きな姿勢動揺がみられる可能性があります。
腰椎部の運動制御が不十分であれば、体幹の側屈や屈曲というような揺れが強まる可能性があります。
また、安定性を補償するために股関節筋や脊柱起立筋に過剰な筋活動を必要とするかもしれません。
過剰な筋活動を常に必要とすれば、易疲労性にもつながります。
歩行開始において、腹横筋の役割を十分に理解しつつ、骨盤帯の評価を進めていくことが大切です。
フィードフォワード制御の考え方
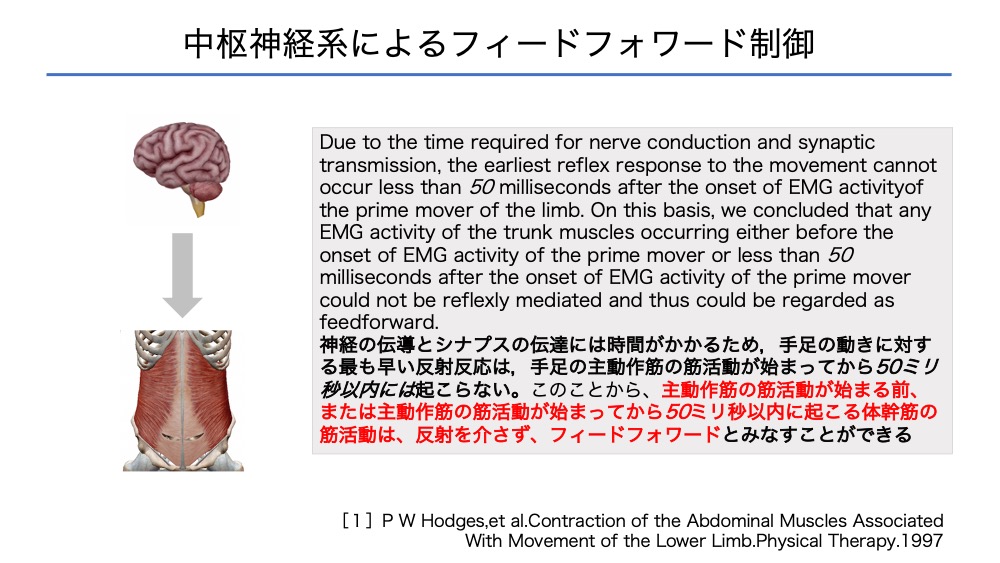
下肢運動に先立つ腹横筋の活動は、フィードフォワード制御です。
振り返ると、フィードバックとフィードフォワードを混同してしまったり、理解が不十分で誤った解釈をしていたことが過去にありました。
フィードフォワード制御を理解する上で、Hodgesら[1]の説明がわかりやすく本質的だと思います。
筋肉からの感覚フィードバックでは説明できない速さで、腹横筋が活動している
→腹横筋はフィードフォワード
ただし、時間で考えると腹横筋の活動は一瞬です。
臨床場面で考えたときに、ハンドリングで厳密に鑑別できるかは疑問があります。
しかしながら、歩行開始におけるフィードフォワード制御について腹横筋が活動しているという事実は非常に意義があります。
セラピーにおいて腹横筋へアプローチしつつ、歩行開始における下肢を含めた骨盤帯を丁寧に評価していきましょう。
仮説検証を繰り返し、知識と実践をつなげられるとセラピーの根拠をもつことができます。
予測的姿勢制御(APAs)とバランス
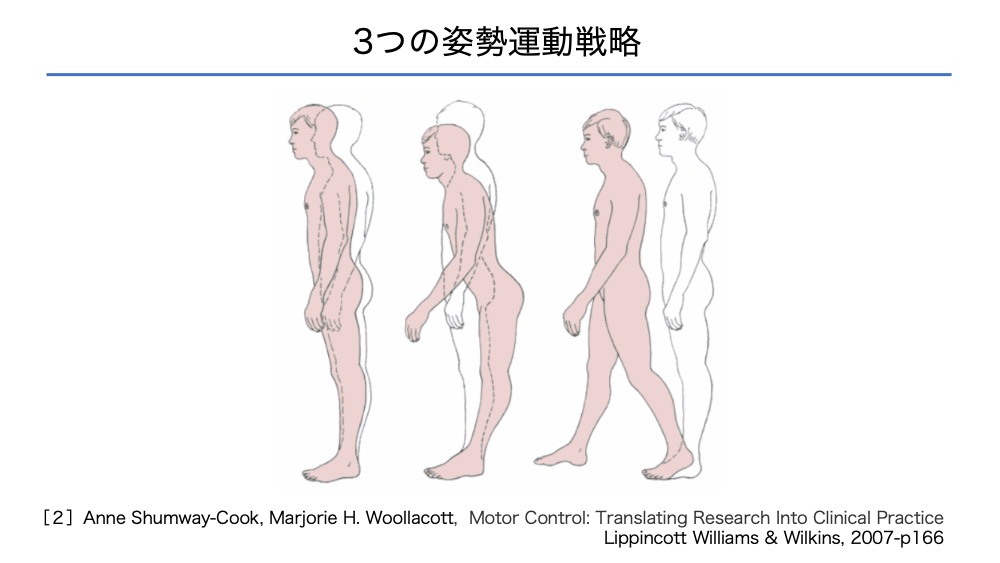
真ん中の図は、股関節戦略を示しています。
骨盤は前傾しており、股関節は屈曲し、足関節は底屈しています。
姿勢運動戦略としては、重心の動揺が大きく、非効率な姿勢運動戦略となります。
ここから、歩行開始における体幹−骨盤−股関節の構成要素を考えてみます。
効率的な姿勢運動戦略のための大切な視点は
骨盤の後傾(相対的な股関節伸展)ができるか
踵側への重心移動を制御できるか
重心の移動に伴う体幹の揺れは最小限か
動きにすると一瞬でわかりにくいかもしれません。
先に述べた腹横筋の役割を頭にいれつつ丁寧に評価できると良いかと思います。
APAsのアプローチ[片麻痺]
片麻痺患者さんにおいて、体幹−骨盤−股関節は非対称性・不安定性なことは多く経験します。
立位姿勢で骨盤を3次元的に捉えることが大切なわけですが、なかなか難しいですよね。
麻痺側下肢がうまく伸びれず、膝が屈曲し沈み込んでいるような場合では、当然骨盤の対称性を確保するのは難しいです。
臨床的には、安定した壁を利用すると良いです。
壁に背中をつけることで、垂直の手がかりとなりますし、安定を助けることができます。
不安定な方は壁の設置面を増やし、少しずつ接地面を減らしていくことで難易度の調整ができます。
歩行開始に多大な労力を必要とするケースは、壁を利用しながら腹横筋の活動を評価してみるのも一つの手段です。
まとめ
今回は、下肢の運動に先立つ姿勢の安定について考えました。
動きに先立つ腹横筋の活動を意識しながら、歩行開始のAPAsについて理解を深めましょう。
難しさもありますが、仮説検証を繰り返し、セラピーの再現性を高めていきましょう。
以上になります。
最後まで読んでいただきありがとうございました。
少しでも明日の臨床につながれば幸いです。